


CONTENTS (IN BRIEF)
- INTRODUCTION
- EQUILIBRIUM OF FORCES
- FRICTION
- CONCEPT OF SIMPLE MACHINE
INTRODUCTION TO ENGINEERING MECHANICS
Mechanics is the Physical Science concerned with the dynamical behaviour (as opposed to chemical and thermal behaviour) of bodies that are acted on by mechanical disturbances. Since such behaviour is involved in virtually all the situations that confront an engineer mechanics lies at the core of much engineering analysis. In fact, no physical science plays a greater role in engineering than does mechanics, and it is the oldest of all the physical sciences. The writing of Archimedes covering buoyancy and the lever were recorded before 200 B.C. Our modern knowledge of gravity and motion was established by Isaac Newton (1642- 1727), whose laws founded Newtonian mechanics.
In 1905, Einstein placed limitations on Newton’s formulations with his theory of relativity and thus set the stage for the development of relativistic mechanics. The newer theory however give result that depart from those of Newton’s formulations only when the speed of a body approaches the speed of light (3 × 108 m/s). These speeds are encountered in the largescale phenomena of dynamical astronomy and the small-scale phenomena involving subatomic particles. Despite these limitations it remains nevertheless true that in the great bulk of engineering problems Newtonian mechanics still applies.
A second limitations was developed somewhat later when it was realized that for atomic distance Newton’s laws were again invalid, thus giving rise to quantum mechanics.
To study mechanics we must establish abstractions to describe those manifestations of the body that interest us. These abstractions are called dimensions. The dimensions that we pick, which are independent of all other dimensions are termed primary or basic dimensions and the ones that are then developed in terms of basic dimensions we call secondary dimensions.
IES MASTER CIVIL ENGINEERING GATE STUDY MATERIALS : CLICK HERE
DIMENSIONAL RELATIONSHIP BETWEEN FORCE AND MASS
We shall now apply or employ the law of dimensional homogeneity to establish a new secondary dimension. A Superficial use of Newton’s law will be employed for this purpose. In the later section this law will be presented in greater detail, but it will suffice at this time to state that the acceleration of a particle is inversely proportional to its mass for a given disturbance. mathematically this becomes: α α 1/m
Where ‘α’ is the proportionality constant. Inserting the constant of proportionality F, we have on rearranging the equation: F = ma
EQUIVALENT FORCE SYSTEM
As a beginning here, we shall reiterate several basic force equivalences for rigid bodies that will serve as a foundations for more complex considerations. You should subject them to the tests listed above.
- The sum of a set of concurrent forces is a single forces that is equivalent to the original system. conversely a single force is equivalent to any set of its components that is concurrent to it.
- A force may moved along its, line of action, i.e., forces are transmissible vectors.
TRIANGLE LAW OF FORCES
If two forces acting simultaneously on a particle be represented in magnitude and direction by the two sides of a triangle taken in order, their resultant may be represented in magnitude and direction by the third side of a triangle, taken in opposite order.
CONVERSE OF LAW OF TRIANGLE OF FORCES
If the forces acting at a point be represented in magnitude and direction by the three sides of a triangle, taken in order, the forces shall be in equilibrium.
POLYGON LAW OF FORCES
If a number of forces acting simultaneously on a particle be represented in magnitude and direction by the side of a polygon taken in order, then the resultant of all these forces may be represented in magnitude and direction by the closing side of the polygon taken in the opposite order.
ACE CIVIL ENGINEERING GATE STUDY MATERIALS : CLICK HERE
CONVERSE OF THE LAW OF POLYGON OF FORCES
If a number of forces acting at a point be represented in magnitude and direction by the sides of a closed polygon, taken in order, the forces shall be in equilibrium. CONDITIONS OF EQUILIBRIUM: When a body is acted upon by a number of coplanar non-concurrent forces, the body may have any one of the following states
- The body may move in any one direction.
- The body may rotate about itself without moving.
- The body may move in any one direction and at the same time it may also rotate about itself.
- The body may be completely at rest.
TYPES OF EQUILIBRIUM
Conditions of equilibrium help in finding out the reactions or forces at particular point, when the body is in equilibrium. A body is said to be in equilibrium when it comes back to its original position, after it is slightly displaced from its position of rest. In general, following are the three types of equilibrium:
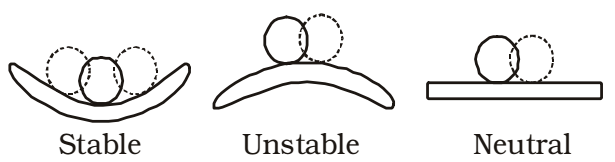
Stable Equilibrium
A body is said to be in stable equilibrium, if it returns back to its original position after it is displaced from its position of rest. This happens when additional force sets up due to displacement and brings the body back to its original position. A smooth cylinder lying in a curved surface, is in stable equilibrium. If we slightly displace the cylinder from its position of rest (as shown by dotted lines), it will tend to return back to its original position in order to bring its weight normal to horizontal axis as shown.
Unstable equilibrium
A body is said to be in an unstable equilibrium, it does not return back to its original position, and heels further away, after slightly displaced from its position of rest. This happens when the additional force moves the body away from its position of rest. A smooth cylinder lying on a convex surface is in unstable equilibrium. If we slightly displace the cylinder from its position of rest (as shown by dotted lines) the body will tend to move away from its original position.
Neutral Equilibrium
A body is said to be in neutral equilibrium if it occupies a new position (and remains at rest in this position) after slightly displaced from its position of rest. This happens when no additional force sets up due to the displacement. A smooth cylinder lying on a horizontal plane is in neutral equilibrium.
CIVIL ENGINEERING MADE EASY GATE NOTES : CLICK HERE
FRICTION
Force of friction or friction: Whenever a block moves or tends to move tangentially with respect to a surface on which it rests, the interlocking property of the projecting particles oppose the motion. This opposing force, which acts in the opposite direction of the movement of the block, is called the force of friction or simply friction. It is of two types: 1. Static friction 2. Dynamic friction
STATIC FRICTION
It is the friction experienced by a body when it is at rest, or in other words, it is the friction when the body tends to move.
DYNAMIC FRICTION
It is the friction experienced by a body when it is in motion. It is also called kinetic friction. The dynamic friction is of the following types:
- Sliding friction: It is the friction experienced by a body when it slides over another body.
- Rolling friction: It is the friction, experienced by a body when it rolls over another body.
LIMITING FRICTION
Considering a body lying over another body and being pushed gently. It does not move. When the force is gradually increased, it starts moving. In this case, the body did not move because of force of friction up to certain limit beyond which the force of friction cannot increase and the body starts moving. The maximum value of frictional force, which comes in to play when a body just begins to slide over the surface of the other body, is known as Limiting friction. It may be noted that when the applied force is less than the limiting friction, the body remains at rest, and the friction is called static friction which has any value between zero and Limiting friction.
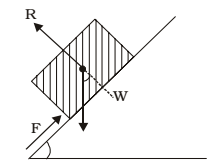
NORMAL REACTION
Whenever a body lying, on a horizontal or inclined surface, is in equilibrium its weight acts vertically downwards through its centre of gravity. The surface in turn, exerts an upward reaction on the plane is called Normal Reaction and is generally, denoted by R.
ENGINEERING MECHANICS STUDY MATERIAL FOR RRB JE PDF CIVILENGGFORALL
DOWNLOAD LINK : CLICK HERE
PASSWORD : CivilEnggForAll
OTHER USEFUL BOOKS
- BUILDING MATERIALS – MOCK TEST 1 (QUICK)
- TELANGANA STATE PUBLIC SERVICE COMMISSION – ASSISTANT ENGINEER 2023 – TSPSC AE 2023 CIVIL ENGINEERING EXAM SOLVED PAPER WITH EXPLANATIONS PDF FREE DOWNLOAD
- SSC JE 2023 CIVIL ENGINEERING (CPWD/CWC/MES) EXAM SOLVED PAPER PDF FREE DOWNLOAD
- BIHAR PUBLIC SERVICE COMMISSION ASSISTANT ENGINEER (BPSC AE) 2022 CIVIL ENGINEERING EXAM SOLVED PAPER WITH EXPLANATIONS PDF
- NHPC (NATIONAL HYDROELECTIC POWER CORPORATION) JUNIOR ENGINEER NHPC JE 2022 CIVIL ENGINEERING EXAM SOLVED PAPER PDF FREE DOWNLOAD
Leave a Reply